A new era of open source funding? How we raised $5,099 for core work.
As part of our mission to bring awesome drone software, we focus intensively on sustainability (a.k.a. how to pay for development, bug fixes, new features, hosting, etc. for the benefit of all).
Open-source is a tricky type of software to fund. I will not cover the details, as other people have already done a great job of summarizing the problem.
I have a keen interest in finding solutions to the open-source funding problem. In particular, how do you give more voice and decision-making power to the community? How can a community better steer the direction of the project? What features are worth implementing right away? What has value? What is noise?
When I stumbled on the idea of quadratic payments I knew that something interesting was up. The core ideas that came out of the quadratic payments paper as applied to open-source are that:
- It’s not economically advantageous for people to directly fund open-source software. A system could make it advantageous by combining each pledge with additional funds from a sponsor pool. The additional funds optimally compensate for the value a pledge benefits other users. Example: if Bob makes a contribution ($25) for something that could be valuable to Alice, Bob needs to be compensated for the additional benefit that Alice gets ($25). So Bob’s pledge needs to be worth $50. More pledges lead to more overall value for everyone involved, making it economically advantageous for both Bob and Alice to pledge.
- Pledging money toward the implementation of a feature/bug is not just a mean of payment, it’s also a vote of preference. It helps answer the question of “what’s important to me as a user?”.
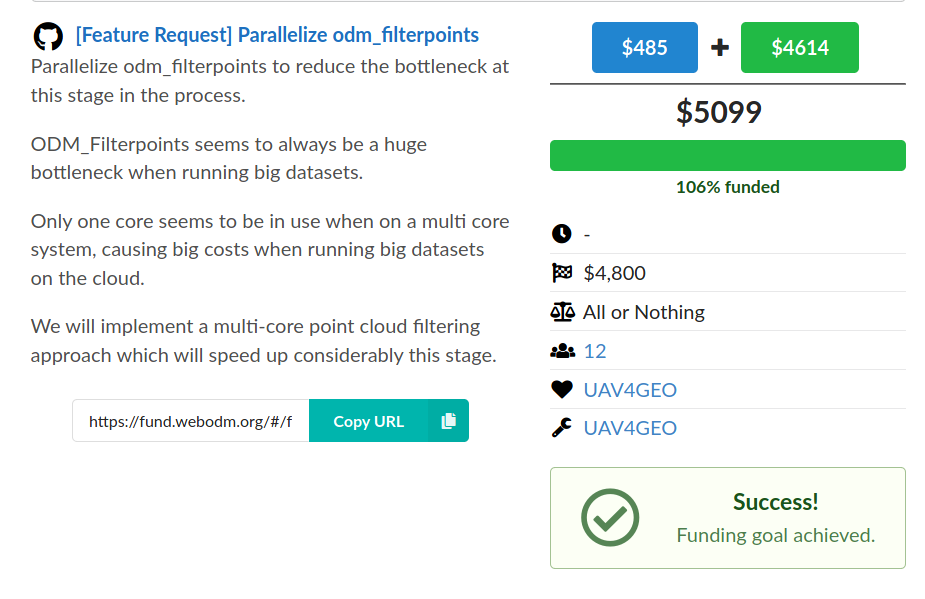
So a month ago we built a platform to collect pledges from users and opened three funds with different funding goals. As excitement built-up, we successfully met the funding goal for one of the three funds with $5,099 worth of pledges.
Where does the “sponsor pool” money come from? It’s from one of the organizations that currently develops and benefits commercially from OpenDroneMap software. While ~90% of the funds come directly from this sponsor pool, the remaining 10% is community driven.
If you think this is not a lot, you might be missing the most important value of the funding process: the voting aspect of it.
As maintainers of FOSS we receive hundreds of feature requests. Time is limited however, so how do you prioritize? Thumbs up on GitHub / forum polling is a “one-person one vote” system, which is not ideal. If you let a single organization sponsor the development of a feature, you get a “one-dollar one-vote” system, which gives too much power to the single organization.
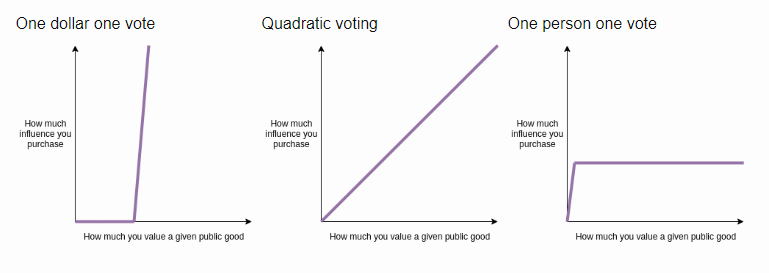
Quadratic voting is a fairer system. After the funding period has ended, we know what the community values and we know what to prioritize.
Oh, and we raised some funds in the process, too! Win-win?
We hope this model can be studied, improved and replicated in other FOSS communities. It could be the start of a new era of sustainable funding.